
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me 아두 이노 서보 모터 2 개 제어 on Google, you do not find the information you need! Here are the best content compiled and compiled by the toplist.Experience-Porthcawl.com team, along with other related topics such as: 아두 이노 서보 모터 2 개 제어 아두이노 서보 모터 LED, 서보모터 회로도, 아두이노 시리얼 모니터 서보모터, 서보모터 여러개 제어, 아두이노 외부전원 여러개, 아두이노 모터 제어, 서보 모터 테스트
…
동작은 다음과 같다.
- W 입력 => 서보모터 1 앞으로 30도 회전
- S 입력 => 서보모터 1 뒤로 30도 회전
- A 입력 => 서보모터 2 왼쪽으로 30도 회전
- D 입력 => 서보모터 2 오른쪽으로 30도 회전
e4ds make
- Article author: make.e4ds.com
- Reviews from users: 27700
 Ratings
Ratings - Top rated: 3.8
- Lowest rated: 1
- Summary of article content: Articles about
e4ds make
Updating … - Most searched keywords: Whether you are looking for
e4ds make
Updating - Table of Contents:
e4ds make
Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루
- Article author: kd3302.tistory.com
- Reviews from users: 6284 Ratings
- Top rated: 3.0
- Lowest rated: 1
- Summary of article content: Articles about Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 … …
- Most searched keywords: Whether you are looking for Arduino Servo Motor 두개 동시에 제어해보자. :: 다루두루 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 … 지난 글에서 서보모터를 다뤄보면서 Arduino Servo Motor의 작동원리를 알아봤는데요. 그때 글에서는 두 개 중 아래쪽 서보모터의 상태가 좋지 못해서 위쪽 것만 움직여 봤잖아요? 이번 글에서는 브라킷으로 연결..공부하면서 정리하는 노트같은 블로그입니다.,
- Table of Contents:
아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법
- Article author: diyver.tistory.com
- Reviews from users: 14725 Ratings
- Top rated: 3.4
- Lowest rated: 1
- Summary of article content: Articles about 아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법 목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. …
- Most searched keywords: Whether you are looking for 아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법 목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. <목표> – 아두이노 내부 전원은 매우 약하다. 각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다. 전류가 부족한 문제로, 모터쪽으로 과전류가 흐르게 되면 아두이노가 오작..
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
태그
티스토리툴바
[모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문)
- Article author: ai0.kr
- Reviews from users: 22443 Ratings
- Top rated: 4.1
- Lowest rated: 1
- Summary of article content: Articles about [모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문) – 오렌지 핀으로 제어할 수 있는 각도의 범위는 0 에서 179도까지이다. -> 180 단계. ○ 1-3-2. 서보모터 기본제어. ▷ [실습 1- … …
- Most searched keywords: Whether you are looking for [모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문) – 오렌지 핀으로 제어할 수 있는 각도의 범위는 0 에서 179도까지이다. -> 180 단계. ○ 1-3-2. 서보모터 기본제어. ▷ [실습 1- … ● 모듈 구성 안내 1-3-1. 서보모터란 무엇인가 1-3-2. 서보모터 기본 제어 1-3-3. for 구문으로 서보모터 제어하기 1-3-4. 포텐셜미터(가변저항)으로 서보모터 제어하기 ● 1-3-1. 서보모터란 무엇인가? ▶ 모..
- Table of Contents:
● 모듈 구성 안내
● 1-3-1 서보모터란 무엇인가
● 1-3-2 서보모터 기본제어
● 1-3-3 for 구문으로 서보모터 제어하기
● 1-3-4 포텐셜미터(가변저항)으로 서보모터 제어하기
FINISH
태그
‘1 아두이노’ Related Articles
![[모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문)](https://img1.daumcdn.net/thumb/R800x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2Fbch6vq%2FbtqH3x9VLj0%2FQNUQvi65SjL87j490GkVt1%2Fimg.png)
아두 이노 서보 모터 2 개 제어
- Article author: wiznetacademy.com
- Reviews from users: 12060 Ratings
- Top rated: 4.7
- Lowest rated: 1
- Summary of article content: Articles about 아두 이노 서보 모터 2 개 제어 서보 (servo) 모터 : DC 모터의 한 종류로 DC 모터에 귀환 회로를 추가하여 정확한 위치 제어가 가능하도록 구성된 모터이다. 가격 면에서는 귀환 제어 회로로 인해 스테핑 … …
- Most searched keywords: Whether you are looking for 아두 이노 서보 모터 2 개 제어 서보 (servo) 모터 : DC 모터의 한 종류로 DC 모터에 귀환 회로를 추가하여 정확한 위치 제어가 가능하도록 구성된 모터이다. 가격 면에서는 귀환 제어 회로로 인해 스테핑 …
- Table of Contents:
[Chapter 2.] 2-17. 서보 모터 제어하기
- Article author: samstory.coolschool.co.kr
- Reviews from users: 15311 Ratings
- Top rated: 3.1
- Lowest rated: 1
- Summary of article content: Articles about [Chapter 2.] 2-17. 서보 모터 제어하기 갈색은 GND에, 빨간색 선은 5V에, 주황색 선은 아두이노의 PWM 핀에 연결한다. 서보 모터는 상당한 전력을 소모하므로 두 개 이상을 움직여야 할 경우. …
- Most searched keywords: Whether you are looking for [Chapter 2.] 2-17. 서보 모터 제어하기 갈색은 GND에, 빨간색 선은 5V에, 주황색 선은 아두이노의 PWM 핀에 연결한다. 서보 모터는 상당한 전력을 소모하므로 두 개 이상을 움직여야 할 경우.
- Table of Contents:
![[Chapter 2.] 2-17. 서보 모터 제어하기](http://cache.coolschool.co.kr/image/fit?url=%2F%2Fsamstory.coolschool.co.kr%2Fimgviewer%2Fstartownboard%2F_quick%2F2019%2F05%2F28%2F863a52757031aa14d84d1a7ef5ffff84d0b397db.jpg)
상품: [로봇사이언스몰] 아두이노 모터 서보 120도 B117
- Article author: robotscience.co.kr
- Reviews from users: 43166 Ratings
- Top rated: 3.3
- Lowest rated: 1
- Summary of article content: Articles about 상품: [로봇사이언스몰] 아두이노 모터 서보 120도 B117 위치를 제어함으로써 회전각도와 속도를 제어할 수 있음 · 로봇관절이나 스마트 로봇카 등 여러 가지 프로젝트에 활용할 수 있음 · 의 연결선이 있어 사용이 편리함 · 아두 … …
- Most searched keywords: Whether you are looking for 상품: [로봇사이언스몰] 아두이노 모터 서보 120도 B117 위치를 제어함으로써 회전각도와 속도를 제어할 수 있음 · 로봇관절이나 스마트 로봇카 등 여러 가지 프로젝트에 활용할 수 있음 · 의 연결선이 있어 사용이 편리함 · 아두 … RS-0012440,로봇사이언스몰,아두이노,모터,서보,120도,B117,로봇사이언스몰아두이노모터서보120도B117,12440,RS-012440 관련 상품입니다. 로봇사이언스몰을 방문하세요.과학교구, 로보코딩, 코딩로봇, 아두이노, 리틀비츠, 메이키메이키, 라즈베리파이,마이크로비트,microbit
- Table of Contents:
![상품: [로봇사이언스몰] 아두이노 모터 서보 120도 B117](http://robotscience.co.kr/data/goods/1/2018/06/12440_tmp_ccb12db7614a5647f68b0d9de52867d31674large.jpg)
See more articles in the same category here: toplist.Experience-Porthcawl.com/blog.
e4ds make
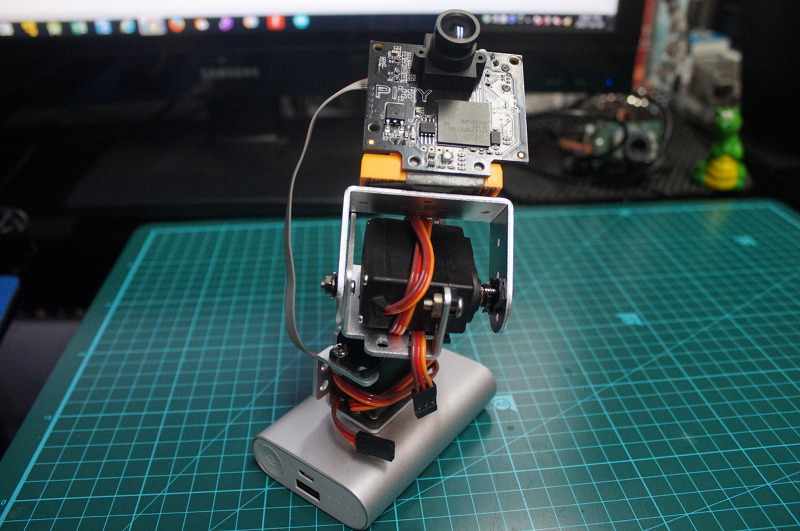
본 실습을 통해 서보모터의 기초를 연습한 후 최종적으로 로봇팔 제어 프로젝트까지 연결할 수 있다.
준비물 : Arduino, 서보모터 2개
내용 : Arduino Uno를 이용하여 서보모터 2개를 제어한다.
전원을 연결하게 되면 서브 모터 2개는 90도에 맞춰 움직인 후 입력을 기다리는 상태가 된다.
동작은 다음과 같다.
1. W 입력 => 서보모터 1 앞으로 30도 회전
2. S 입력 => 서보모터 1 뒤로 30도 회전
3. A 입력 => 서보모터 2 왼쪽으로 30도 회전
4. D 입력 => 서보모터 2 오른쪽으로 30도 회전
☞서보모터의 경우 회전이 0~180도까지 가능하기 때문에 코딩상에 회전을 0~180도까지 제한해야 한다.
회로 연결은 다음과 같다.
아두이노의 5V와 Ground를 브래드 보드에 연결하여 공통 전원을 구성한 후 서브모터 2개의 VCC, GND를 연결하였다. 서보모터에 사용되는 입출력 핀은 3, 5번을 연결하여 회로를 구성하였다. (서보모터는 PWM으로 제어하기 때문에 3,5,6,9,10,11번 핀을 사용하면 됨)
코딩은 다음과 같다. (주석 포함)
#include
//헤더파일 포함 Servo servo1; //servo1 변수 선언 Servo servo2; //servo2 변수 선언 int motor1 = 3; //motor1을 입출력 3번 핀에 연결 int motor2 = 5; //motor2을 입출력 5번 핀에 연결 int angle1 = 90; //초기 각도값 설정 int angle2 = 90; //초기 각도값 설정 void setup() { servo1.attach(motor1); //servo1에 입출력 3번 핀을 지정 servo2.attach(motor2); //servo2에 입출력 5번 핀을 지정 Serial.begin(9600); //시리얼 모니터 사용 Serial.println(“Enter the w,a,s,d “); } void loop() { if(Serial.available()) //시리얼 통신이 가능할 경우 { char input = Serial.read(); //시리얼 모니터 입력 값을 읽어옴 if(input ==’w’) //입력값이 W일 경우 { Serial.print(“+30”); for(int i = 0; i <30; i++) // 30번 반복 { angle1 = angle1 + 1; // angle1의 값에 1씩 30번을 더함 if(angle1 >=180) // angle1이 180보다 커지거나 같아질 경우 angle1 = 180; // angle1을 180으로 고정 servo1.write(angle1); // servo1을 angle1 값에 맞추어 동작 delay(10); } Serial.print(“\t\t”); Serial.println(angle1); } else if(input ==’a’) //입력값이 a일 경우 { Serial.print(“+30”); for(int j = 0; j <30; j++) { angle2 = angle2 + 1; if(angle2 >=180) angle2 = 180; servo2.write(angle2); delay(10); } Serial.print(“\t\t”); Serial.println(angle2); } else if(input == ‘s’) //입력값이 s일 경우 { Serial.print(“\t-30\t”); for(int i = 0; i <30; i++) // 30번 반복 { angle1 = angle1 -1; // angle1의 값에 1씩 30번을 빼기 if(angle1 <= 0) // angle1이 0보다 작아지거나 같을 경우 angle1 = 0; // angle1을 0으로 고정 servo1.write(angle1); // servo1을 angle 값에 맞추어 동작 delay(10); } Serial.println(angle1); } else if(input == 'd') //입력값이 d일 경우 { Serial.print("\t-30\t"); for(int j = 0; j <30; j++) { angle2 = angle2 -1; if(angle2 <= 0) angle2 = 0; servo2.write(angle2); delay(10); } Serial.println(angle2); } } } 시리얼 모니터를 통해 서보모터의 각도를 수치로 확인할 수 있다. 앞으로 모든 실습활동에서 시리얼 모니터를 통해 각도, 입력 값, 데이터 등을 확인할 것이기 때문에 시리얼모니터를 잘 활용하기를 바란다. 위에 빨간색 네모칸에 있는 돋보기 형태의 버튼을 누르게 되면 시리얼 모니터 창의 열리게 된다. 다른 방법으로는 상단의 툴 버튼을 눌러 시리얼 모니터를 클릭하면 시리얼 모니터가 열리게 된다. 시리얼 모니터 결과는 다음과 같다. 시리얼 모니터 입력창에 w, a, s, d를 입력하게 되면 입력한 값에 맞게 각도를 계산하여 현재의 서보모터 각도를 계산하여 출력한다. 동작영상
아두이노 내부전원으로 서보모터(SG-90) 여러개 사용하는 방법
<목표>
– 아두이노 내부 전원은 매우 약하다.
각종 센서나 LED 사용에는 큰 문제가 없지만, 모터류를 사용할 때에는 문제가 항상 따른다.
전류가 부족한 문제로, 모터쪽으로 과전류가 흐르게 되면 아두이노가 오작동 하는 등 문제가 생긴다.
그래서 원래는 외부전원을 사용하는 등 정석의 방법이 존재 한다.
하지만 이런 외부전원 회로를 만드는게 힘든 상황이거나 귀찮을 경우에 서모모터를 여러개 사용해야 하는 경우가 생기곤 한다.
이럴 때에 어떻게해야 아두이노 내부전원으로 서보모터를 여러개 돌릴 수 있을지 알아보자.
<준비물>
– 아두이노(나노, 우노, 메가), 시리얼 통신 케이블, 점퍼선(M-M), 서보모터(SG-90) 여러개
<회로도>
아두이노 내부 전원 5V 를 통해서 서보모터 여러개에 전원 공급을 해준다.
signal 신호는 각각 하나씩 연결을 해준다.
이런 확장보드가 있으면 더욱 편하게 서보모터를 이용할 수 있다.
없다면 미니브레드보드를 이용해서 5V와 GND를 확장시켜줘야 한다.
<코드>
#include
Servo myservo1; // create servo object to control a servo Servo myservo2; // create servo object to control a servo Servo myservo3; // create servo object to control a servo int pos1 = 0; // variable to store the servo position int pos2 = 0; int pos3 = 0; int pos = 0; void setup() { Serial.begin(9600); } void loop() { myservo1.attach(7); delay(100); for (pos1 = 0; pos1 < 360; pos1 += 1) { if(pos1 >= 180) pos = 359-pos1; else pos = pos1; myservo1.write(pos); delay(15); } delay(500); myservo1.detach(); myservo2.attach(8); for (pos2 = 0; pos2 < 360; pos2 += 1) { if(pos2 >= 180) pos = 359-pos2; else pos = pos2; myservo2.write(pos); delay(15); } delay(500); myservo2.detach(); myservo3.attach(9); for (pos3 = 0; pos3 < 360; pos3 += 1) { if(pos3 >= 180) pos = 359-pos3; else pos = pos3; myservo3.write(pos); delay(15); } delay(500); myservo3.detach(); } <실행 결과>
위의 영상에서 확인할 수 있는 것처럼, 모터가 순서대로 잘 돌아가는 것을 확인할 수 있다.
이번 포스팅에서 핵심은
에 있는 함수 두개가 핵심이다. 바로 ~.attach( ) 와 ~.detach( ) 이다.
~.attach( ) 는 해당 핀에 전류를 흘려 보내는 것이다.
정확히 말하자면 전류이긴 하지만, PWM 신호에 맞춰서 신호가 보내진다.
서보모터에 대해서 자세하게 알고 싶다면 아래 포스팅을 참고하면 좋다.
그렇다면 ~.detach( ) 는 무슨 역할을 할까?
함수 이름에서 유추할 수 있듯이 반대 개념으로 전류를 차단하는 역할을 한다.
일단 위에서 각각 함수의 역할에 대해서 알았으므로, 좀 더 전문적으로 이해해보자.
서보모터는 PWM 신호에 따라서 각도를 유지하는데, 서보모터에 전류가 들어가 있으면 손으로 힘을 주어도 각도가 강하게 유지된다.
다른 상황으로, 서보모터를 아두이노에서 다 분리한 상태로 사람의 힘으로 모터를 돌리면 빡빡하지만 각도가 변하면서 돌아가게 된다.
이런 현상이 있는 이유는, 5V 와 GND 때문이 아니라, signal 신호 때문에 그렇다.
전류 공급이 되지 않는 서보 모터는 그냥 일반적인 기어드모터 라고 보면 된다.
하지만 전류가 공급이 되고 있는 서보 모터는 스텝모터와 같아진다.
힘을 주어 모터를 강제로 회전시키려해도 계속 해당 각도를 유지하려 하기 때문에 회전이 되지 않는다.
보통은 아두이노에서 서보모터를 사용할 때, ~.detach( ) 함수를 사용하지 않는다.
외부전원을 사용하는 경우에는 당연 필요가 없을 뿐더러, 전류가 계속 들어가야 그 각도가 유지되기 때문이다.
그럼에도 간단히 테스트 하는 상황에서 서보모터를 여러개 사용해야 할 때가 분명 있다.
그런 경우가 있으니깐 이렇게 검색해서 이 포스팅을 찾아왔을 것이니 말이다 ㅎㅎ
~.detach( ) 함수를 사용해서 서보모터를 원하는 방향으로 회전시키고 전류를 차단시키고,
다음 서보모터를 ~.attach( ) 함수를 사용해서 원하는 각도를 가리키는 신호를 보내주는 것이다.
이렇게 하면 아두이노 내부 전원으로도 충분히 서보모터를 제어할 수 있게 되는 것이다.
그러면 궁금증이 하나 생긴다. 서보모터에 전류를 빼면 각도 유지가 제대로 안 되는것 아닌가? 라는 궁금증 말이다.
반은 맞고, 반은 틀리다.
당연히 외부의 힘이 강하게 들어온다면 각도 유지는 되지 않는다.
하지만, 전류 없는 서보모터를 사람 손으로 돌리려 했을때, 쉽게 되지는 않는다는 경험을 다 해봤을 것이다.
그렇다, 엄청 강한 외부 힘이 아니면 서보모터는 기어드모터와 같기 때문에 그 각도를 애초에 유지할 수 있는 것이다.
로봇에 사용하는 서보모터에는 당연히 외부전원을 사용하는 것이 좋고,
간단하게 사용하는 경우라면 이렇게 ~.attach( ) 와 ~.detach( ) 함수만을 이용하면 쉽게 여러개 서보모터를 제어할 수 있게된다.
또한 배터리를 이용하는 경우 전력소모를 줄이는 과정이 필요한데,
이 때에도 ~.detach( ) 를 사용해서 전류를 차단해 주는 것이 좋다.
물론 힘을 많이 받는 경우에는 당연히 ~.detach( ) 를 사용하면 좋지 않은 결과를 초래할 수 있다…
이건 경험과 실제로 해보지 않는이상 모르는 것이니깐 이런 방법도 있다더라~ 하고 참고하면 될듯 하다.
※ 궁금하시거나 질문사항이 있으시면 댓글로 작성해주시면 답변해 드릴 수 있는 부분에서 친절히 답변드리겠습니다!
[모듈 1-3] 아두이노 서보모터 제어하기 (feat. For 구문)
● 모듈 구성 안내
1-3-1. 서보모터란 무엇인가
1-3-2. 서보모터 기본 제어
1-3-3. for 구문으로 서보모터 제어하기
1-3-4. 포텐셜미터(가변저항)으로 서보모터 제어하기
● 1-3-1. 서보모터란 무엇인가?
▶ 모터의 종류
– 오늘 우리가 다룰 서보 모터는
로 모터의 위치제어가 주 목적이다. – 모터의 위치제어란 아래 사진의 모터 위에 있는 흰색(액추에이터)의 각도 조절을 말한다.
▶ 모터의 연결
– 서보모터의 3개의 선 중, 적색(+), 갈색(-) 은 각각 VCC와 GND를 공급하여 서보모터에 전력을 공급한다.
– 오렌지 핀은 데이터 핀으로서 20ms(0.02초) 동안 1과 0의 신호 비율을 통해 내가 원하는 서보모터의 각도 값으로 제어 할수 있다.
– 오렌지 핀으로 제어할 수 있는 각도의 범위는 0 에서 179도까지이다. -> 180 단계.
● 1-3-2. 서보모터 기본제어
▶ [실습 1-3-2-1] 서보모터 기본 각도 제어
– 아래와 같이 아두이노 회로 구성을 한다.
출처 : 코딩런 : https://codingrun.com/110
– 아래 코드를 복붙하여 아두이노에 업로드 해보자.
#include
//Servo 라이브러리를 추가 Servo servo; //Servo 클래스로 servo객체 생성 int value = 0; // 각도를 조절할 변수 value void setup() { servo.attach(7); //servo 서보모터 7번 핀에 연결 // 이때 ~ 표시가 있는 PWM을 지원하는 디지털 핀에 연결 } void loop() { value = 0; servo.write(value); //value값의 각도로 회전. ex) value가 90이라면 90도 회전 delay(500); value = 45; servo.write(value); delay(500); value = 90; servo.write(value); delay(500); value = 135; servo.write(value); delay(500); value = 179; servo.write(value); delay(500); } ☞ value 값에 180 이상의 값을 넣어봅시다. 잘 작동하지 않는 다면 이유가 무엇일까요?
● 1-3-3. for 구문으로 서보모터 제어하기
▶ 반복동작을 위한 < for 구문 > 의 기본 구조
▶ [실습 1-3-3-1] 서보모터 for 구문으로 제어
– 아래 코드를 타이핑 하여 넣어보자. (기존 코드 수정, 회로 구성 1-3-2 동일)
#include
//Servo 라이브러리를 추가 Servo servo; //Servo 클래스로 servo객체 생성 int value = 0; // 각도를 조절할 변수 value int ii = 0; // for 구문의 변수 선언 void setup() { servo.attach(7); //맴버함수인 attach : 핀 설정 } void loop() { for(ii = 0; ii < 180 ; ii++) // ii++ : ii 가 1씩 커진다. { servo.write(ii); delay(30); } } ☞ 위 코드에 대한 서보모터의 동작을 for구문과 연결시켜 설명해 보자. ▶ [실습 1-3-3-2] 서보모터 2개의 for 구문 제어 - 아래 코드를 타이핑 하여 넣어보자. (기존 코드 수정, 회로 구성 1-3-2 동일) #include //Servo 라이브러리를 추가 Servo servo; //Servo 클래스로 servo객체 생성 int value = 0; // 각도를 조절할 변수 value int ii = 0; // for 구문의 변수 선언 void setup() { servo.attach(7); //맴버함수인 attach : 핀 설정 } void loop() { for(ii = 0; ii < 180 ; ii++) { servo.write(ii); delay(30); } for(ii = 179; ii > 0; ii–) // ii– : ii가 1씩 작아진다. { servo.write(ii); delay(30); } } ☞ 위 코드에 대한 서보모터의 동작을 2개의 for구문과 연결시켜 설명해 보자.
★ [도전과제 1-3-3] step 변수로 서보모터 동작 크기 정하기
– 2개의 servo.write( /* 어떻게 들어가야 할까요? */ ); 부분을 채워 동작을 시켜보세요.
#include
Servo servo; int value = 0; int ii = 0; void setup() { servo.attach(7); } void loop() { // step_size, step_num 선언 int step_size = 30; // 한번에 30도씩 서보모터를 움직이겠다. // 180도에 step_size를 나누어 180도에서 서보모터가 움직이는 횟수를 구했다. float step_num = 180 / step_size; for(ii = 0; ii < step_num ; ii++) { servo.write( /* 어떻게 들어가야 할까요? */ ); delay(500); // 힌트 : 기존의 ii는 1씩 커지면서 1도씩 움직였으니 // ii에 무언가를 곱하면 되겠쥬? } for(ii = step_num; ii > 0; ii–) { servo.write( /* 어떻게 들어가야 할까요? */ ); delay(500); } } ☞ 동작을 성공한 학생은 step_size에 45, 90도를 주어서 서보모터의 동작을 확인해 보세요.
● 1-3-4. 포텐셜미터(가변저항)으로 서보모터 제어하기
▶ 포텐셜 미터(가변저항)
– 포텐셜 미터 3개의 핀중 양 끝 2개의 핀은 VCC, GND에 연결하여 전원을 공급합니다.
– 가운데 A0 핀은 포텐셜 미터의 로터의 회전값을 전송해 주는 데이터 핀으로
아두이노의 아날로그 입력핀인 A0 ~ A5 중에 연결해 주어야 합니다.
– 포테셜 미터의 회전값은 로터의 회전 각도의 따라 0 ~ 1023 값으로 변환되어 A0에 출력됩니다.
▶ [실습 1-3-4] 포텐셜미터로 서보모터 제어하기
– 아래와 같이 회로 구성을 합니다.
출처 : https://sites.google.com/site/physicalcomputingeducation/inputoutput/potentiometer-servo
– 아래의 코드를 아두이노에 업로드 하고 코드의 주석을 통해 코드의 의미를 이해해 보세요.
#include
Servo myServo; // myServo 객체 생성 int potPin = A0; // A0를 myServo의 입력핀으로 쓴다. int potVal; // potVal 변수에서 포텐셜미터의 입력값을 받는다. int angle; // myServo에 입력할 angle. void setup() { myServo.attach(9); } void loop() { // potPin에서 받아온 포텐셜 미터의 입력 값을 PotVal에 저장 potVal = analogRead(potPin); /* 중요 */ // 포텐셜 미터의 입력값 potVal의 크기 범위 : 0 ~ 1023 // 서보모터의 각도 입력값 angle의 범위 : 0 ~ 179 // 따라서 아래와 같이 map 함수를 통해 potVal값의 크기의 비율을 조정하여 angle에 넣어줘야 한다. angle = map(potVal, 0, 1023, 0, 179); // 0~179 크기로 변환된 angle값을 서보모터에 입력을 준다. myServo.write(angle); delay(15); } ☞ map 함수의 역할을 설명해 보세요.
★ [도전과제 1-3-4] 2개의 서보모터 제어하기.
– 아래 영상을 통해 도전과제의 목표를 확인 하시오.
영상 제공 : 컴퓨터전자과 3학년 이00 학생
– 아래의 아두이노 회로를 구성하시오.
– 아두이노 입출력 핀은 변경해서 사용해도 무관합니다.
– 아래 코드를 기반으로 loop() 함수의 내용을 코딩하여 2개의 서보모터를 2개의 포텐셜미터로 제어하는 동작을 구현하시오.
#include
Servo xservo; Servo yservo; int xservopin = A0; int yservopin = A1; int xval = 0; int yval = 0; int xangle = 0; int yangle = 0; void setup() { xservo.attach(9); yservo.attach(10); } void loop() { /* xservo와 yservo를 2개의 포텐셜 미터로 각각 제어하는 코드를 완성하시오 */ } FINISH
글쓴이 : Wonking / 교사 성원경
So you have finished reading the 아두 이노 서보 모터 2 개 제어 topic article, if you find this article useful, please share it. Thank you very much. See more: 아두이노 서보 모터 LED, 서보모터 회로도, 아두이노 시리얼 모니터 서보모터, 서보모터 여러개 제어, 아두이노 외부전원 여러개, 아두이노 모터 제어, 서보 모터 테스트